

P6 - Robotic ultrasound for SBRT of the prostate
Alexander Schlaefer
Institute of Medical Technology and Intelligent Systems, Hamburg University of Technology
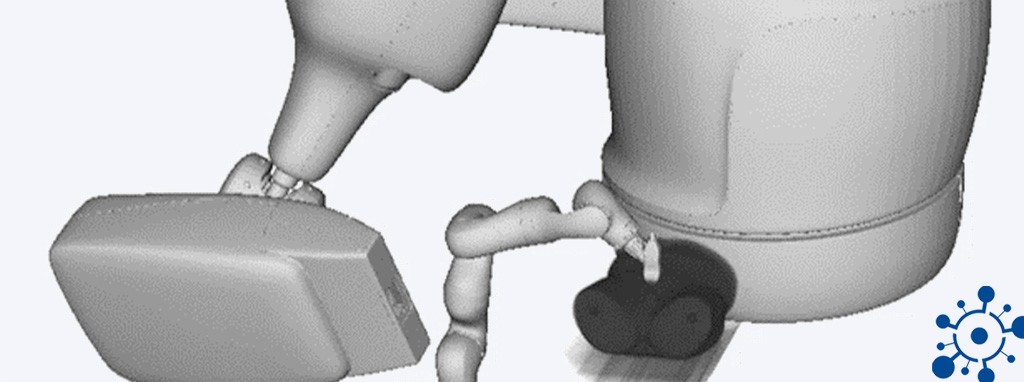
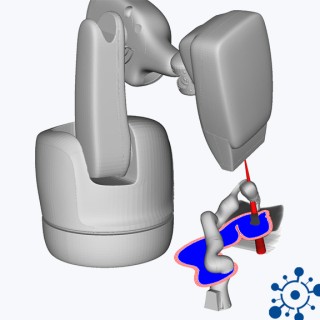
During stereotactic body radiation therapy (SBRT), respiratory motion can be effectively compensated, e.g., using the robotic CyberKnife. However, prostate motion is mostly spontaneous, and frequent X-ray imaging adds to the overall dose. To overcome these limitations and to allow for continuous motion tracking we are working on robotic ultrasound image guidance. We study machine learning approaches and volumetric ultrasound for estimating tissue motion. Moreover, we work on integrating the ultrasound robot into the overall treatment scenario.
Partners: Prof. F. Ernst, Universität zu Lübeck; Dr. C. Fürweger, ERC München
Grants:DFG SCHL 1844/3-1/2 „Robotisierte Ultraschall-gestützte Bildgebung zur Echtzeit-Bewegungskompensation in der Strahlentherapie (RobUST)“
Contact: schlaefer@tuhh.de
-
Selected publications on topic
AI-based optimization for US-guided radiation therapy of the prostate. Gerlach S, Hofmann T, Fürweger C, Schlaefer A.Int J Comput Assist Radiol Surg. 2022 Nov;17(11):2023-2032. doi: 10.1007/s11548-022-02664-6. Epub 2022 May 20.PMID: 35593988 Free PMC article.
Optimizing robot motion for robotic ultrasound-guided radiation therapy. Schlüter M, Fürweger C, Schlaefer A.Phys Med Biol. 2019 Oct 4;64(19):195012. doi: 10.1088/1361-6560/ab3bfb.PMID: 31422960
Robotic ultrasound-guided SBRT of the prostate: feasibility with respect to plan quality. Gerlach S, Kuhlemann I, Jauer P, Bruder R, Ernst F, Fürweger C, Schlaefer A.Int J Comput Assist Radiol Surg. 2017 Jan;12(1):149-159. doi: 10.1007/s11548-016-1455-7. Epub 2016 Jul 12.PMID: 27406743